Deep SSMs for Naturalistic Behavior Generation via Long Horizon Planning
I am applying Deep State-Space Models (SSM) - S4 (break down version article of S4) and S5 - to latent data and policy generated by Mimic-MJX for biomechanically realistic behavior sequence dynamics modeling and generation in professor Scott Linderman's lab at Stanford University. Currently, I am building upon previous works in the lab (S5) by framing the sequence modeling problem as an Long Horizon Planning Problem.
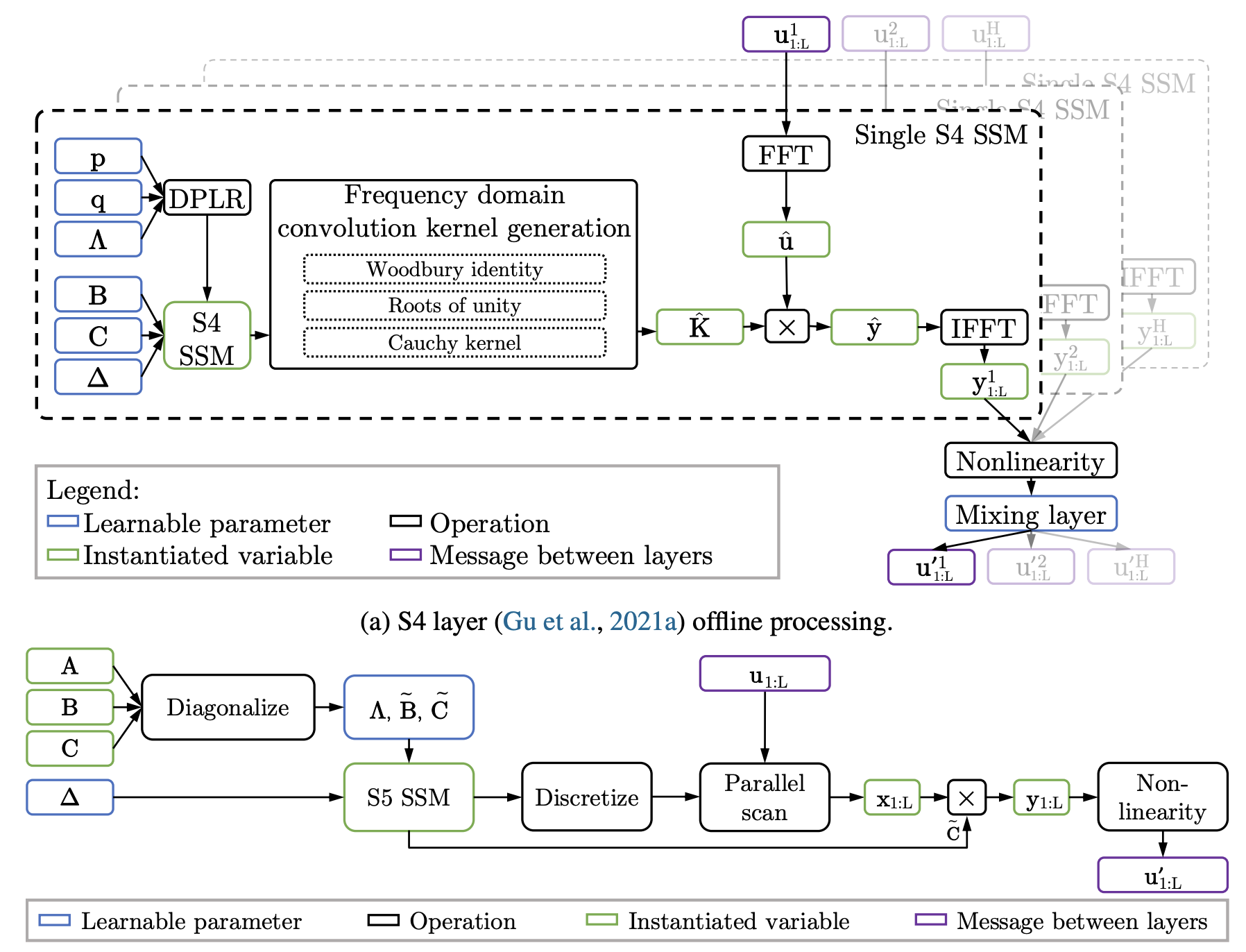
Comparing S4 and S5, in courtesy of S5 paper (Figure 4).